
mdInfinity offers high value software to improve geospatial data workflows and the quality of deliverables. In this web paper, An algorithm for outlier rejection based on density and morphology filters, mdInfinity presents the principle and some results of the mdInfinity Outlier Rejection applied to UAV LiDAR and photogrammetry 3D point clouds. Our method is based on the combination of a density and an innovative morphology filters.
AN ALGORITHM FOR OUTLIER REJECTION BASED ON DENSITY AND MORPHOLOGY FILTERS
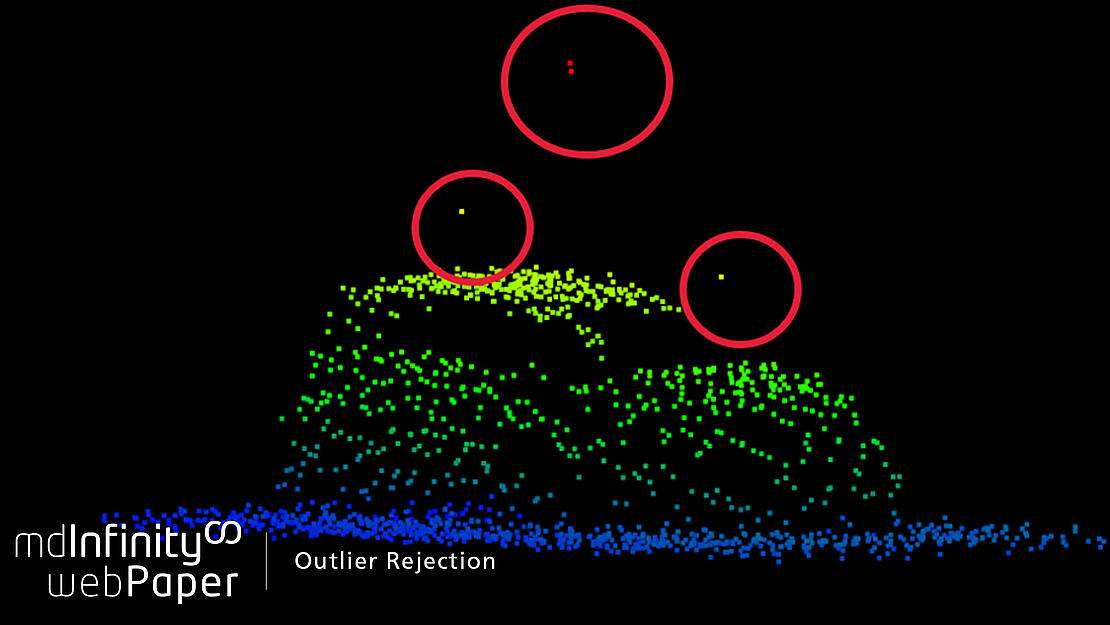
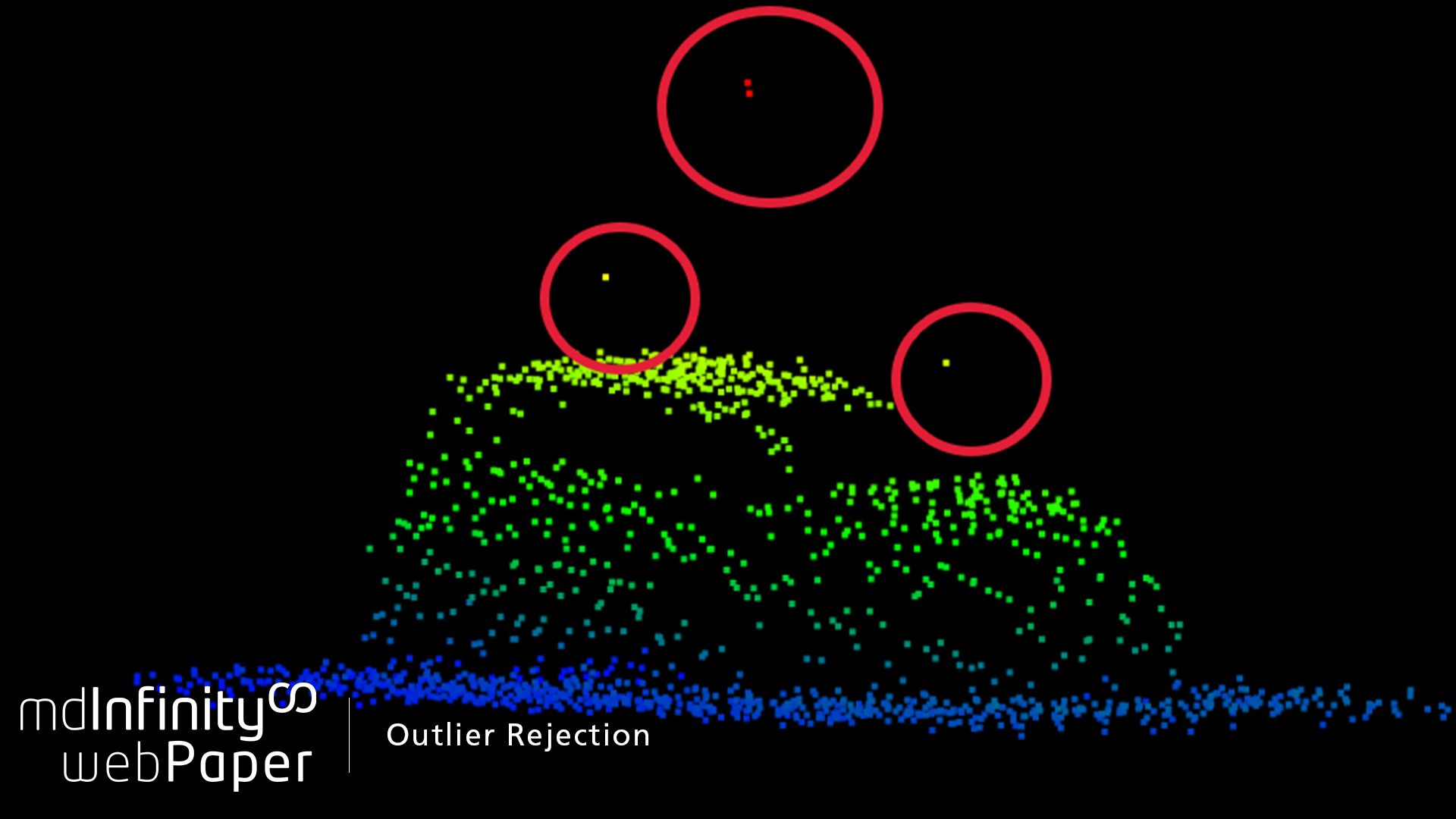
Outliers are punctual measurement errors that cannot be explained by the characteristics of the acquisition system. They are values that are not statistically consistent with the other elements of the dataset.
It is important to eliminate outliers since they are often the source of problems for point could analysis tools. They can lead to faulty object reconstruction and may create bias in shape measurements. When creating a high-quality point cloud, outlying points should not be seen in the final deliverable.
mdInfinity developed a specific approach to detecting outliers that is designed to be used on 3D point clouds, and more specifically on 3D point clouds acquired by Drone LiDAR systems like the mdLiDAR1000 aaS.
Outlier rejection from mdInfinity is based on density and morphology which enable the user to isolate points belonging to relevant structures. (e.g. poles, cables) The Microdrones denoising module reduces the noise level while preserving edges and irregular features in the point cloud.
In this web paper mdInfinity will present the findings and results for:
- Outlier concepts and definitions
- The mdInfinity approach of outliers detection
- The mdInfinity Outliers detection method
- Density based outliers detection
- Morphology based outliers detection
- Merging of the two outlying scores
- Combination of Outliers Detection and Denoising
- Conclusion
Learn why it’s important to use the mdInfinity point cloud denoising method and the outliers detection algorithm to reduce the quantity of unreliable information in a 3D point cloud, to create powerful data deliverables.
For more information on Outlier Rejection or to speak with a Microdrones representative CLICK HERE.