
mdInfinity offers high value software to improve geospatial data workflows and the quality of deliverables. In this web paper, A Geometric and Probabilistic Point Cloud Denoising Algorithm,mdInfinity presents the findings and results of the mdInfinity denoising algorithm applied to UAV LiDAR and photogrammetry point clouds. A series of comparisons with a classical denoising method illustrates the performance of mdInfinity’s approach in terms of denoising capability and preservation of complex geometric features.
A GEOMETRIC AND PROBABILISTIC POINT CLOUD DENOISING ALGORITHM WEB PAPER
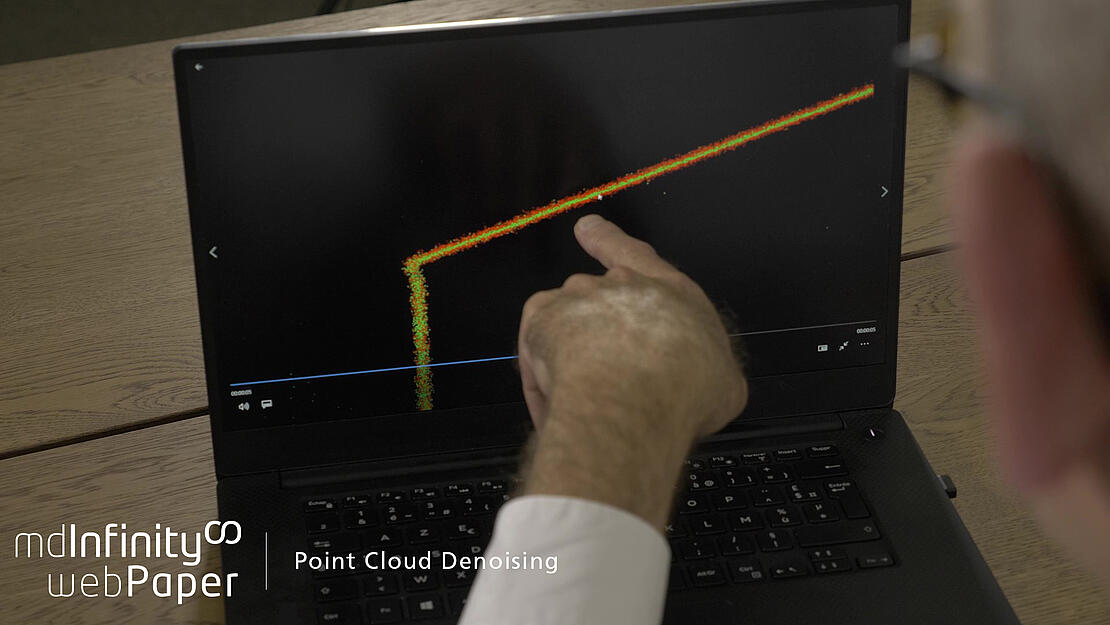
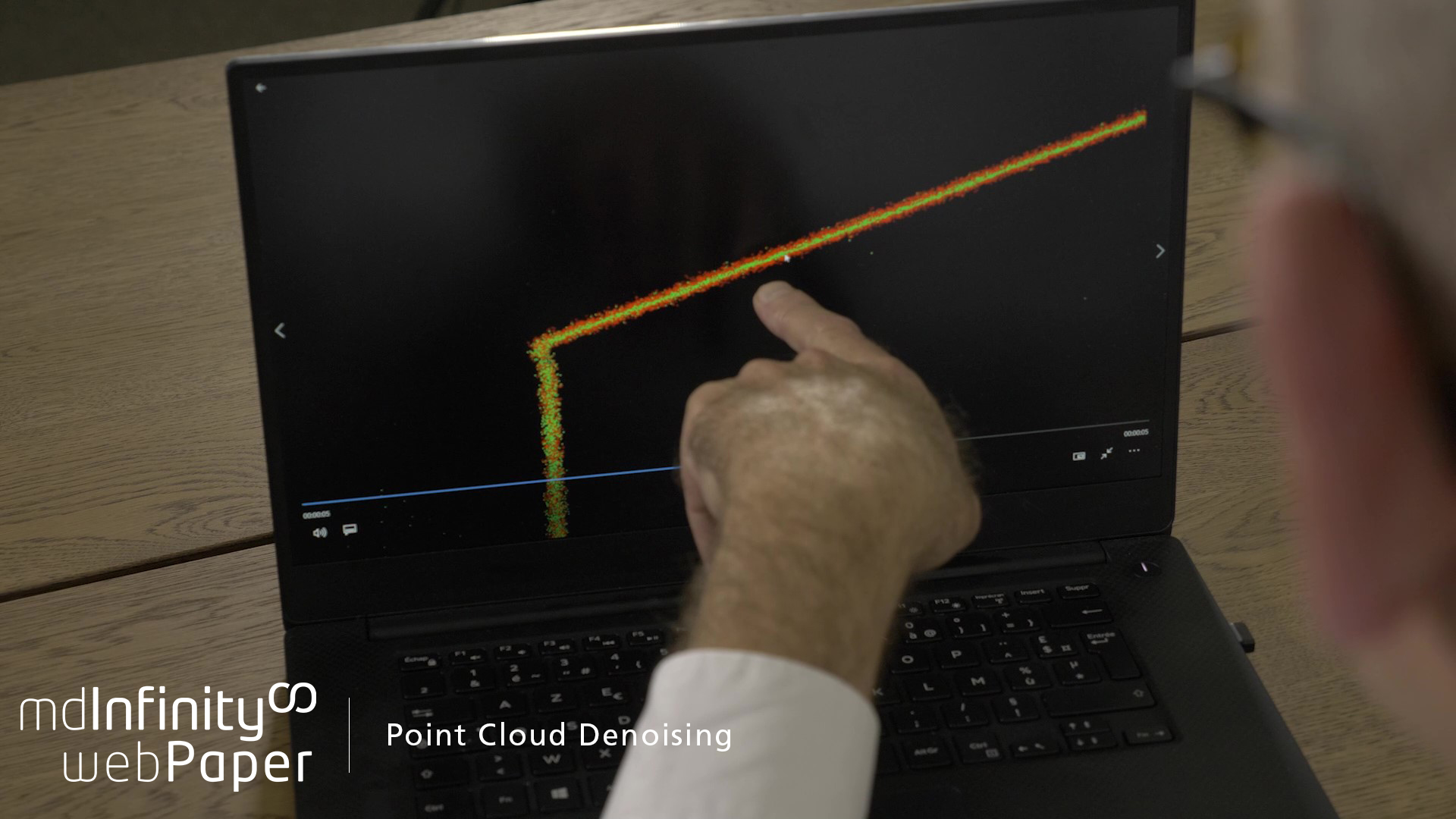
When using drone Lidar, like the mdLidar3000DL aaS, to acquire data to create point cloud deliverables there is always a degree of noise to be accounted for. The denoising method developed by mdInfinity aims to reduce the level of random errors in a point cloud. Random errors produce noise while gross errors produce outliers that no physical model can explain. For example, the gross error can be a bird, or anything that came in between the sensor and the ground. The noise is the error in measurement of the sensor.
In summary, the three types of errors effecting the quality of LiDAR point clouds are:
- Systematic errors generate uncertainty that may become visible within the strip overlaps
- Random errors from sensors (IMU, GNSS, LiDAR) produce measurement noise
- Non modeled errors generate outliers.
The mdInifinty denoising module reduces the noise level while preserving edges and irregular features in the point cloud. Denoising consists in removing the high frequency component of the uncertainty along the surface of an object. It therefore requires the modeling of the underlying surface to each point.
In this web paper mdInfinity will present the findings and results for:
- The mdInfinity approach to denoising
- Denoising results
- Comparison with other denoising methods
- How denoising improves the LiDAR system precision
- Results for point cloud from photogrammetry
- Conclusions
Overall, you’ll learn how the mdInfinity denoising tool is an efficient, capable and adapted method for extracting reliable information from a noisy point cloud and can provide deliverables with a precision level similar to what could be obtained with a high precision sensor.
For more information on Denoising or to speak with a Microdrones representative CLICK HERE.