An inside look at THE MICRODRONES workflow for drone-based LiDAR.
Unmanned aerials vehicles (UAVs) – or drones – are showing up in the skies above mines all over the world. From exploration to mapping to monitoring, UAVs are being used to perform more and more functions on job sites. Global Mining Review recently published an article where Jaume Cazorla Milla, Microdrones, UAE, provides an inside look at the workflow for drone-based LiDAR at a coal mine.
As the use of this technology becomes more prevalent, many in the mining industry have questions about what it would look like to incorporate drones into their core operations. Exploring the workflow involved in specific case studies can give potential users insight into the process as they evaluate whether drones make sense for their businesses.
Jaume Cazorla Milla is a geospatial engineer for Microdrones, a company that develops professional-grade UAV solutions for surveying and mapping. He has traveled to dozens of mines to walk potential and new users through the process of using drones to achieve tasks that can be tedious, time-consuming, and dangerous.
“My goal is to demystify drone use,” explained Cazorla, “so professionals in the mining industry can seriously consider how this technology might help them be more efficient, safe, and profitable.”

Cazorla recently worked with a coal mining company that wanted to test out using UAV-based LiDAR to accomplish a task that happens regularly on their job sites: calculating soil volume. The goal was to conduct an aerial survey of the mine’s irregular terrain and then create a 3-D point cloud and digital surface model (DSM). Normally the company would survey the mine in a traditional manner with GNSS RTK receivers, but were interested to try the drone to see if it would improve their efficiency.
“Completing the project the way the company usually does it takes two men working eight hours per day for three to five days,” said Cazorla. “With the Microdrones mdLiDAR1000, they were able to significantly reduce the amount of time, flying the project in about two hours and processing the data that same day.”
There is a growing awareness of the potential of drones to save time and access hard-to-reach areas on the job. Many companies are investing time, research, and capital to ascertain the specifics of implementing drone surveying and selecting the best tool for the job.
“If you have a fully integrated solution that works well for mining, the process should be simple,” said Cazorla, as he began detailing the workflow for the coal mine project. “Many clients are surprised by how easy it is once they try it. However, there are some considerations unique to the mining industry that are helpful to know when getting started.”

Jaume Cazorla Milla, Microdrones Middle East Regional ManagerMy goal is to demystify drone use, so professionals in the mining industry can seriously consider how this technology might help them be more efficient, safe, and profitable.
Exploring the drone surveying workflow: Plan, Fly, Process, Visualize
“With every job that we do at Microdrones, we follow a basic workflow of plan, fly, process, and visualize,” said Cazorla. “The details involved in each of those steps depend on the requirements of the project, but those elements are involved in every project.”
During the planning phase of the coal mining company’s project, the first step was to define the area of interest, the deliverables, and the requirements (see chart A, below). Once these were outlined, Cazorla could help the project team to determine how the flight should be carried out, processing parameters, and expected error.
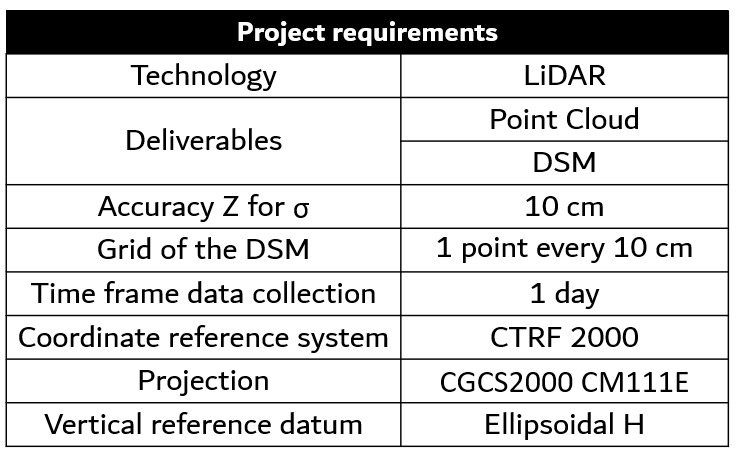
The company wanted to create a point cloud and DSM with an accuracy of 10 centimeters in the Z-axis and a grid of one point every 10 centimeters. Because the one-kilometer by one-kilometer area to be surveyed was steep and irregular terrain, Cazorla chose the mdLiDAR1000 solution from Microdrones for this mission.
LiDAR stands for Light Detection and Ranging. The LiDAR sensor emits a laser that measures the various distances to the surface of the earth, data necessary to create a DSM.
“LiDAR is a desirable approach for most mining projects because it allows for significant time savings when compared with photogrammetry methods,” explained Cazorla. “The mdLiDAR1000 includes everything necessary for the job, including the md4-1000 unmanned aircraft, a fully integrated LiDAR sensor and camera, and all the necessary hardware and software. Also, this solution is smaller and lighter than our mdLiDAR3000, so that makes it easier to transport and carry.”
Special Considerations for Drone Surveying in Mines
In addition to determining which drone solution would be used, Cazorla also identified some key considerations specific to mining that impacted the flight plan.
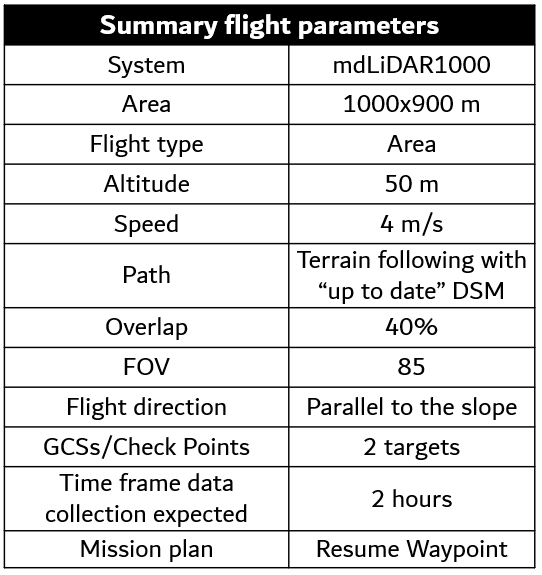
Because the terrain for this project changes significantly at times — the elevation is around 150 meters — Cazorla used a function on the drone called terrain follow, which ensures that the drone stays at a constant altitude during the flight. Under different circumstances, when surveying a natural mountain, terrain follow can be used in default mode. However, this functionality must be approached differently in a mine.
“Mines are a little bit special,” said Cazorla. “Because the elevations we are surveying are artificially made, we can’t just use the terrain following function in default mode. Areas with frequent movement of materials over short periods of time, like mines and construction sites, require an up-to-date DSM be inputted into mdCockpit, the Microdrones flight planning software, to use the terrain following option. By default, mdCockpit uses a global terrain model SRTM, which may not represent the current reality of a constantly-changing terrain.”
Once that DSM is inputted and terrain following is selected, the user can then choose the proper altitude to fly — another detail with special considerations for mining. In choosing the height, the user must consider the reflectivity of the surface, which varies depending on the rocks and minerals present.
“Coal has a similar reflectivity to asphalt, about 17%,” explained Cazorla. “So, we needed to be a bit conservative in our choice of altitude. For this project, we chose 50 meters because that is the maximum altitude that could produce the required point cloud density with that expected surface reflectivity.”
According to Cazorla, a conservative overlap between flight strips is also desirable for mining projects, due to the irregular terrain and possible vertical walls. For this project, Cazorla set the overlap at 40% to ensure all necessary data was collected in high-slope areas.
Because this project was utilizing LiDAR, no ground control points (GCP) were necessary. However, Cazorla incorporated a few targets, including one Smart Target with GNSS receiver, into the setup.
“No GCPs are required, but I use them to check the accuracy of the project for quality control during the processing phase,” said Cazorla.
Having set all these parameters, the project team was now ready to outline the timeframe for data collection. They used the Microdrones mdFlight Performance App (mdFPA) to determine the maximum flight time per battery under their specific environmental circumstances and flight parameters. The total estimated flight time was two hours, including four flights of around 30 minutes. To simplify the task, they made use of the Resume Waypoint feature in the mdCockpit app, which allows you to change the battery mid-way through the flight and then have the flight automatically resume exactly where it left off.
The last part of mission planning is to calculate the expected project errors based on the system specifications. The expected accuracy of this project was about six centimeters. Later, during the processing phase, these calculations were used to check the accuracy of the outcomes.
All flight parameters for this project are summarized in chart B, below.
Data Collection and Quality Control
“From there, we are ready to fly!” said Cazorla.
Once the drone launches, it autonomously follows the planned flight path, collecting data in strips while traveling back and forth over the area selected in the mdCockpit app. The pilot monitors the flight by watching the drone both physically in the sky and virtually on a tablet.
In less than two hours, the data acquisition was complete and Cazorla was ready to begin processing. He implemented several quality control steps to ensure the accuracy of the data. First, he examined the GCPs, checking that they were all in the area of interest, that no target was partially covered or damaged, and that there were no initial problems with any target. Once satisfied with the condition of GCP imagery, he processed the trajectory using mdInfinity, a processing software developed by Microdrones.
“The first thing I look at is the processing status,” said Cazorla. “The closer to zero, the better it is. Then I check the RMS for the trajectory. In this case, it was less than two centimeters for X and Y and less than three centimeters for Z. Last, I check that there are no IMU gaps for any of the flights.”
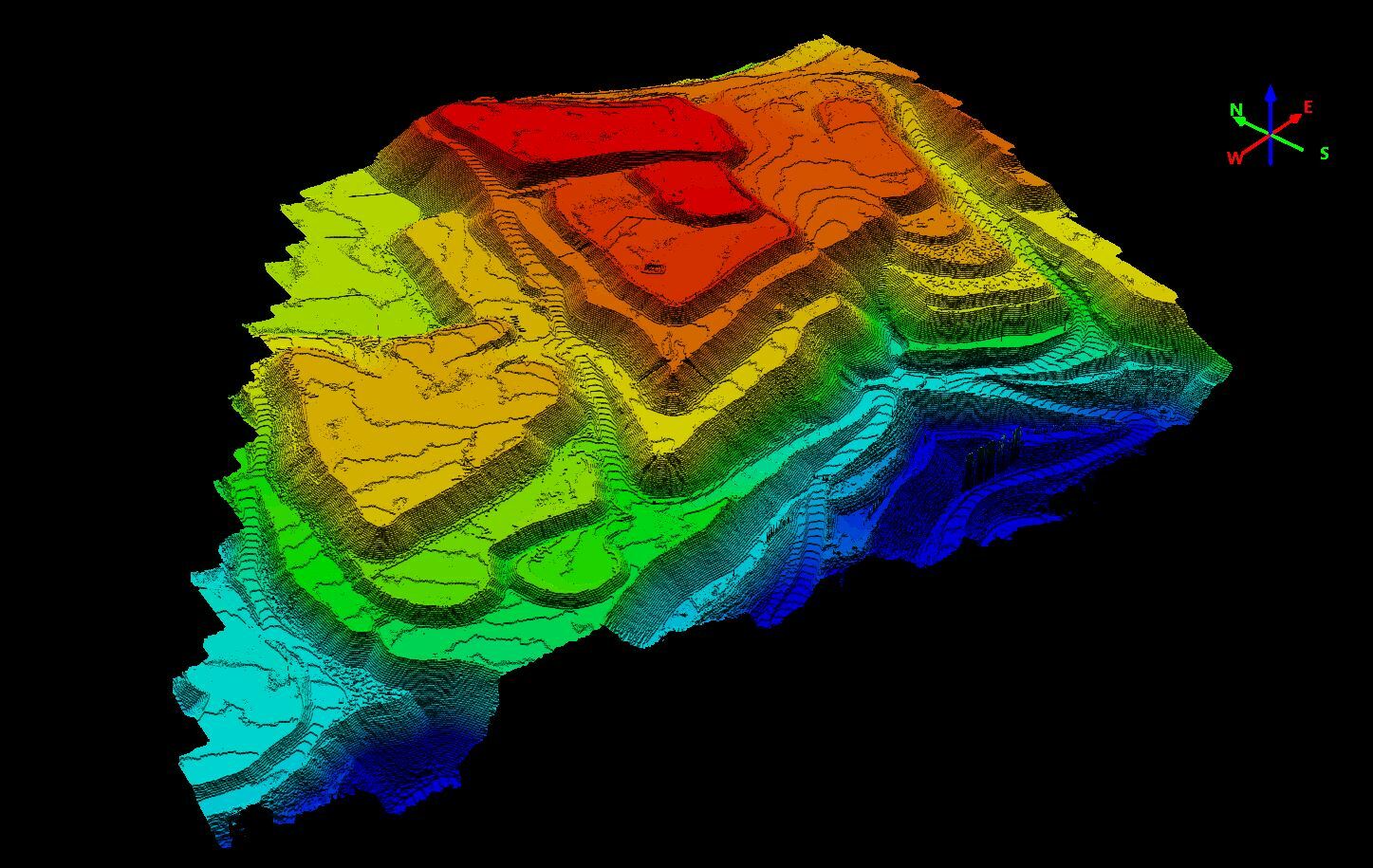
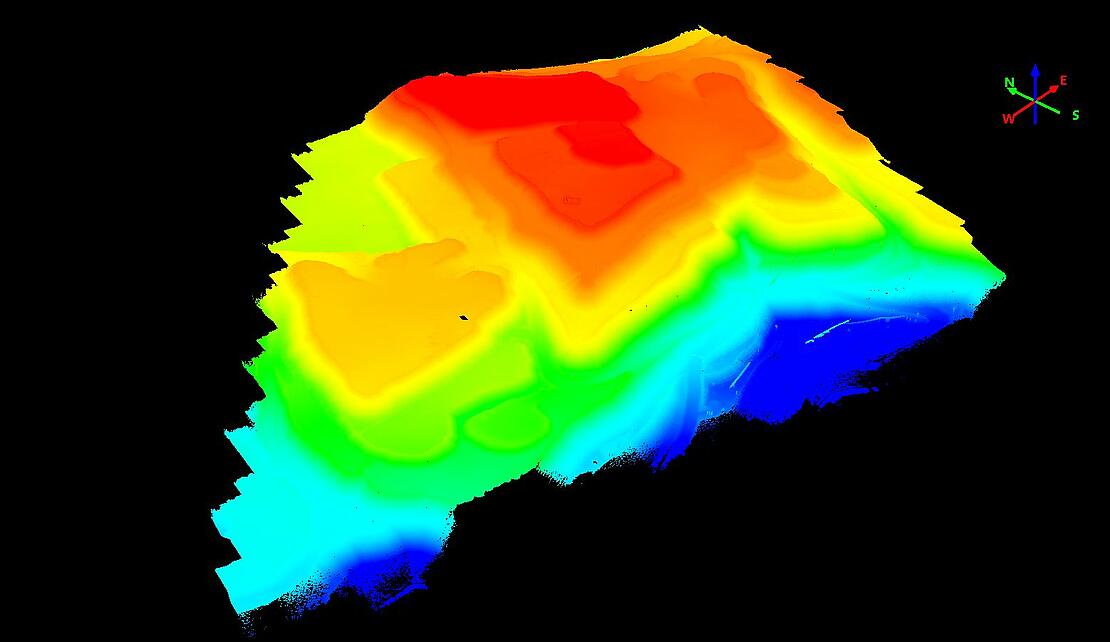
Having gone through these quality control steps, he then generated the georeferenced point cloud by inputting the raw LiDAR data and the payload calibrations into mdInfinity. Once the pointcloud was generated (Image 1, below) he used the precision enhancement tool to improve the pointcloud, explaining that this step would improve the overall quality of the DSM.
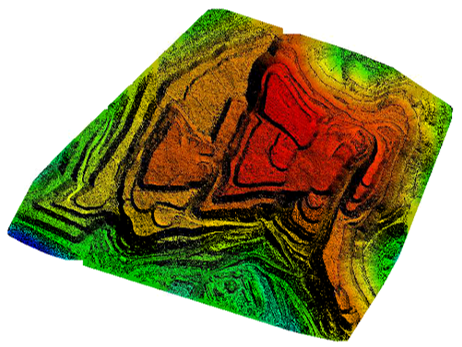
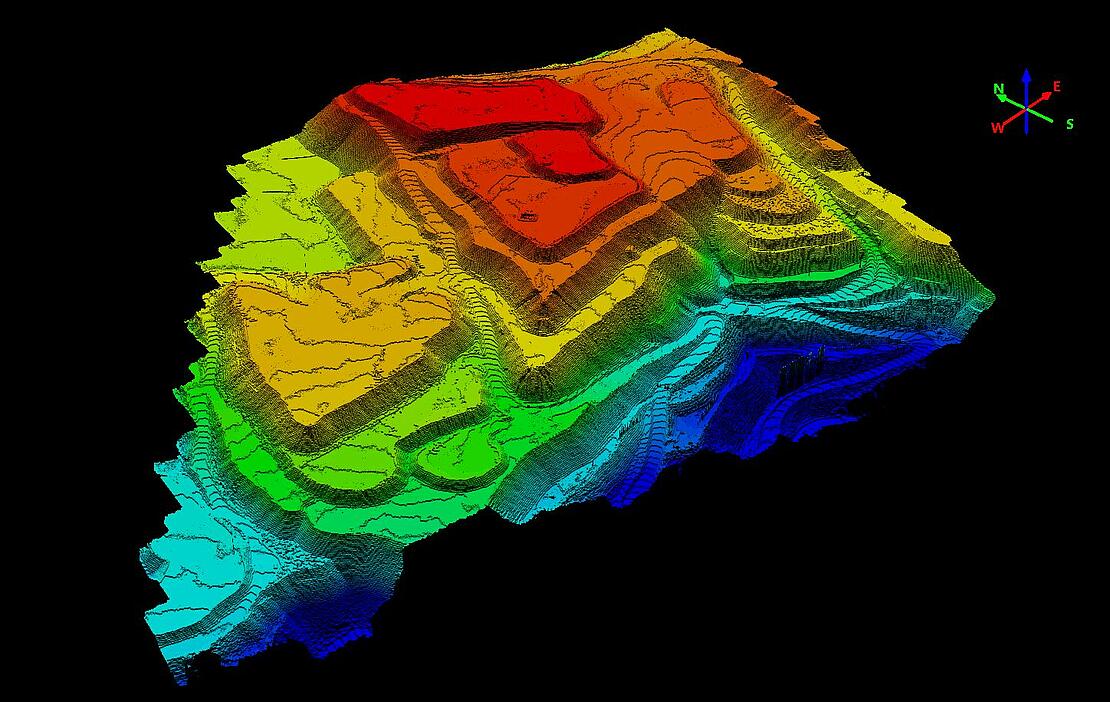
From there, he inputted the point cloud into GIS software, selected the desired accuracy and elevation grid, and created the DSM (Image 2, below). He also created a contour line generation, another requirement of the coal mining company.
“Once the deliverables were created, we conducted a strip alignment analysis, an accuracy assessment, and error analysis to compare what we got to the project requirements,” said Cazorla. “We found that the accuracy was very good and that the data and deliverables met all of the requirements. Our RSM was 1.5 centimeters, which is extremely accurate, even more than I would expect. Users of this system can expect an RSM less than 6 centimeters.”
Next, Cazorla created an Independent Accuracy Assessment Report of the 3D Point Cloud to confirm the quality of the project for the coal mining company and establish that the mission was successful.
“The process may sound complex, but once you have done it a few times, it is very easy,” said Cazorla. “Some people can be hesitant to learn new technologies, but I say it is worth it. You can learn to do all of this in the amount of time you would save using a drone on just one project.”
If you are interested in adding Drone LiDAR to your mining workflow, CLICK HERE to speak with a representative from Microdrones.