TRAJECTORY PROCESSING
mdInfinity is a unique data processing software solution that is packaged with either the purchase or rental of drone survey equipment from Microdrones to help you quickly and efficiently process geospatial data.
Microdrones has created a series of videos that take a closer look at the mdInfinity data processing modules to explore why they are important and what benefits they provide. In this video, we review how to do Trajectory Processing of drone survey data. Watch in the player below or read the following summary.
How Does Trajectory Processing Work?
Trajectory Processing in mdInfinity is a module that processes data collected from drone surveying to improve the accuracy of the position and attitude of the sensor collected during the flight. Essentially, the software is determining where the Lidar sensor was in 3D space at all times throughout the flight. This is calculated using the raw GNSS data and IMU data from the payload and marrying it with a base station of some sort. Trajectory Processing is used for both Lidar and photogrammetric solutions.
For drone Lidar, like the mdLiDAR1000 aaS, the module creates an SBET file that stores the trajectory from the sensor at all times in 3D space. With the validated trajectory, users can then use the mdInfinity Georeferencing module to produce an LAS Point cloud.
Trajectory Processing is also used for drone photogrammetry, capturing the trigger events and the geospatial location where each event happened. In this case, the modules create an exterior orientation (EO) file, that you can then bring into photogrammetric software and build orthomosaics.
Getting Started with Trajectory Processing
mdInfinity allows you to process your data whether it’s on the cloud or the desktop version and improves your workflow with easy, repeatable results. The software is adapted to work seamlessly with Microdrones surveying equipment. Upon logging in to mdInfinity choose the Trajectory Processing module in the project dashboard and follow the steps to Input Information, select a Base Station, Choose your Output Format, review the Summary and process your data.
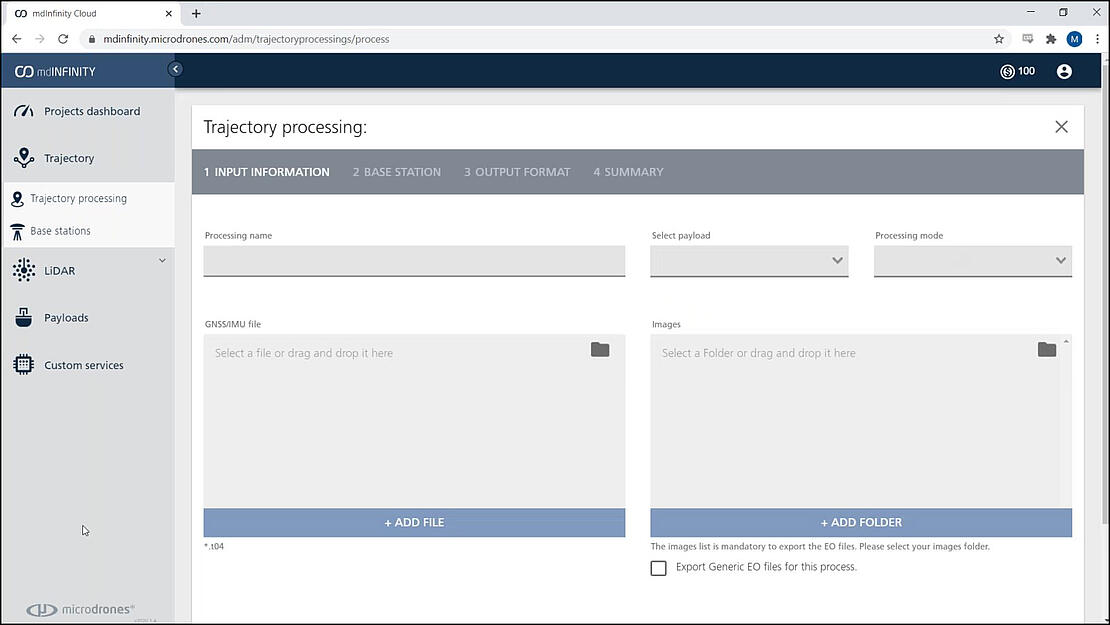
1. Input Information
To start a new project, click on the Add Processing Task button and give the file an appropriate name for your project. Then select the payload used and the processing mode.
To move to the next step, simply drag and drop the raw trajectory files into the GNSS IMU file window. The Microdrones integrated systems use the Applanix IMU, which provides a T04 file from the Lidar payload. Drag and drop the T04 into the GNSS/IMU file.
Adding images to export exterior orientation files and build a colorized point cloud or an orthomosaic is also easy. Simply select the image folder from the onboard camera and upload the files to the image window in mdInfinity. Once all the images are uploaded, click on the next step.
2. Base Station
The next step is to input your base station. For projects that require multiple flights over time, using the same base station data, mdInfinity allows you to save that location for future reference, eliminating the need to manually input the location each time. If you used a Base station, select Yes and choose whether you want to enter your coordinates manually or compute them using Trimble RTX.
If you didn’t have a Base Station, mdInfinity provides options to use the Trimble PP-RTX or the Applanix Smart Base for your coordinates.
3. Output Format
Once the Base Station is finished uploading, the next step is to select the Output Format for the trajectory file as well as the exterior orientation file. For the photo location, if you don’t choose the default coordinate system you are able to use the External Orientation Output Coordinate system to achieve inputting the coordinates, angle, latitude and longitude as well as the horizontal and vertical datum.
4. Summary & Process
The final tab provides a quick summary for review, to ensure all the correct information and data was input. Then click accept for the terms and choose to process the data. Upon completion, mdInfinity will provide a note that your SBET is finished processing and you can choose to download or go right into the georeferencing.
In the download folder, you’ll see the SBET that’s been processed with mdInfinity, the quality report, as well as an additional KML file. You’ll also see a separate file containing the EO files for your photogrammetry.
Benefits of Trajectory Processing
Data collected with the Microdrones survey equipment can be processed exclusively within mdInfinity. The main benefit provided by mdInfinity is the streamlined workflow all through one suite of powerful, data processing software. For example, surveyors can’t always anticipate what’s going to happen in the field. If you have base station issues, Trajectory Processing has a solution with the virtual base stations such as Trimble PP-RTX or the SmartBase.
On construction or mining sites, you often have to fly the same project over weeks and months to compare data. Trajectory Processing allows you to save your base station coordinates and utilize them anytime you need to process data. This helps keeps your data consistent and accurate.
In summary, the Trajectory Processing module is a user-friendly workflow for users to process raw GNSS data (with or without base station), hybridize IMU and GNSS data to produce a smooth trajectory file and export it as a EO/sbet files in the desired coordinate system.
Users are able to validate the trajectory parameters before processing and obtain different types of EO files depending on the software they will use afterwards.
To learn more about using the Trajectory Processing Data Module in mdInfinity, CLICK HERE to speak with a representative from Microdrones.