
mdInfinity Software
mdInfinity is a complete software solution for your Drone LiDAR and photogrammetry data processing. Our unique data processing modules improve your geospatial data workflows and the quality of your deliverables.
In the video below, Robert Chrismon, a Professional Land Surveyor and Marketing Manager for Microdrones provides an overview of the Precision Enhancement Data Processing Module within the mdInfinity suite, explains why it’s important, and reviews how the module addresses 2 types of LiDAR errors. A summary is also provided or for more information, please CLICK HERE to download a special web paper on An algorithm for outlier rejection based on density and morphology filters.
Precision Enhancement Data Processing Module
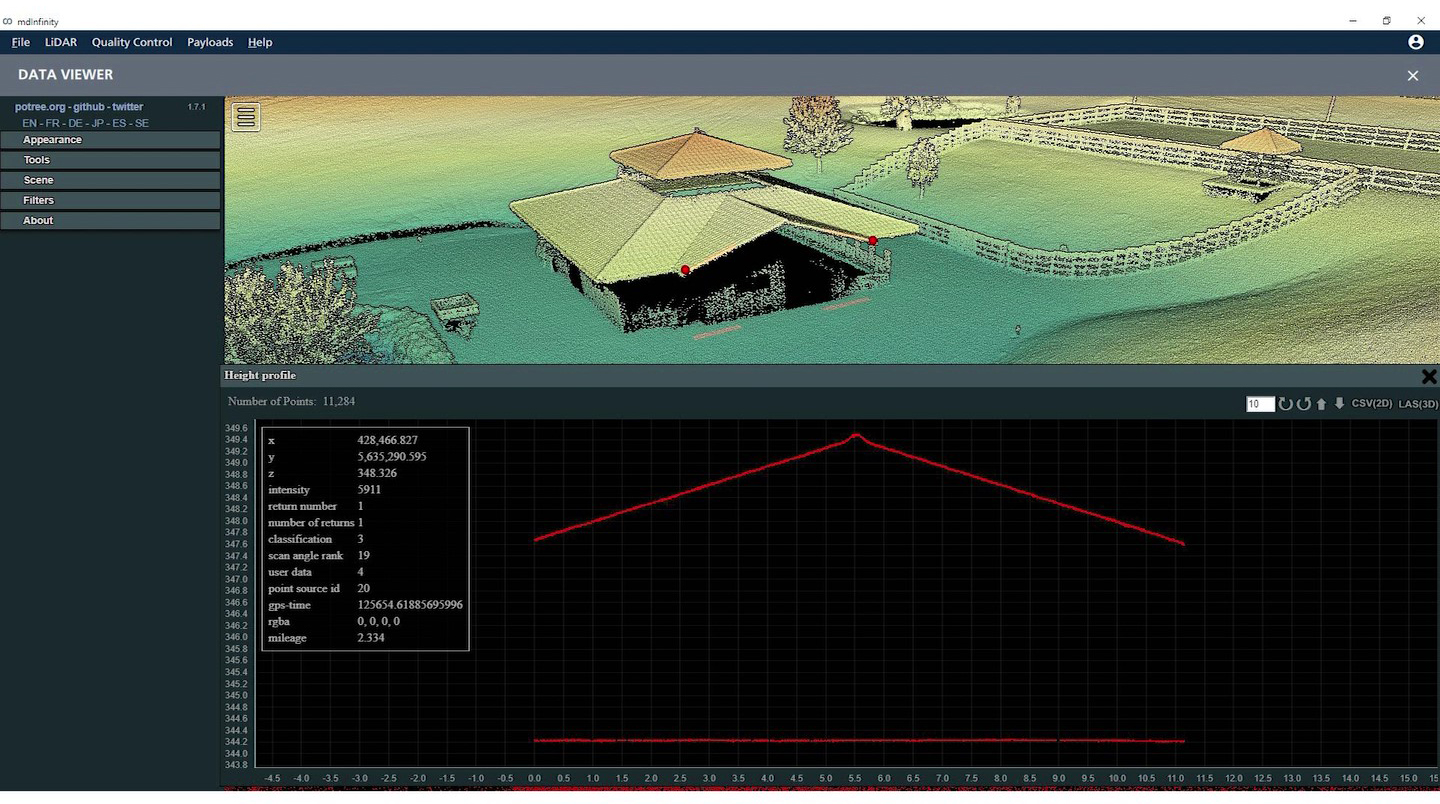
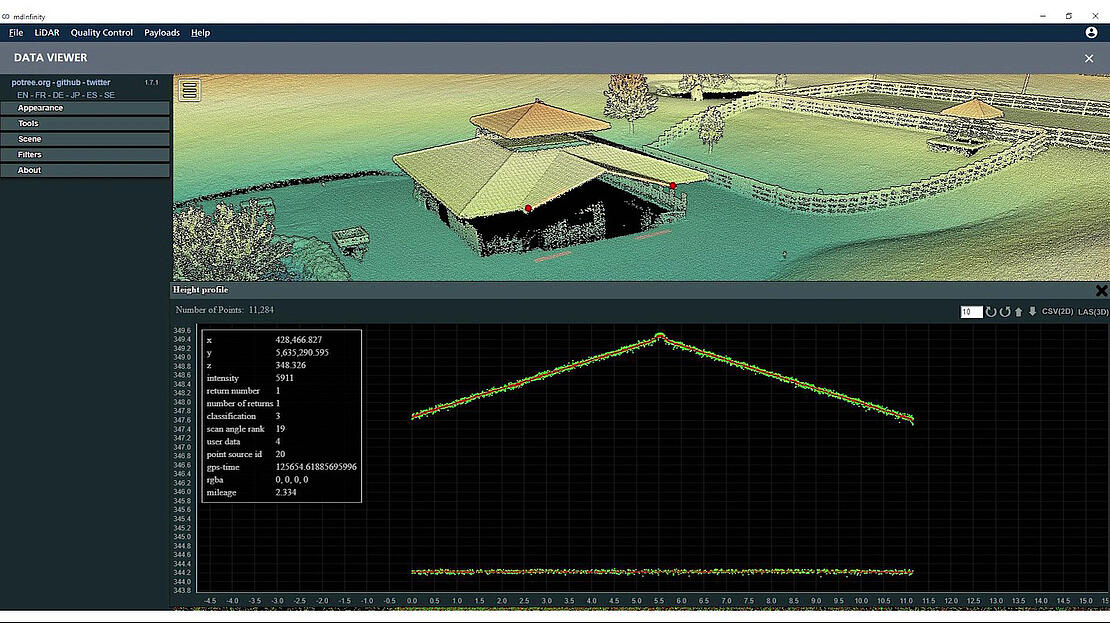
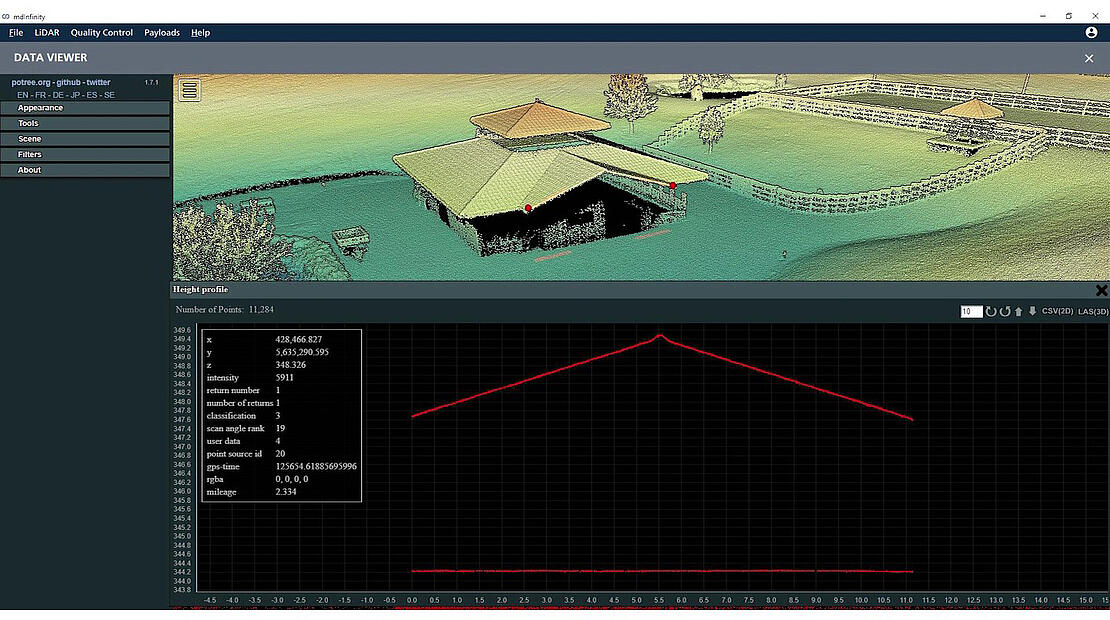
The mdInfinity Precision Enhancement module is used to reduce the noise level of a point cloud while preserving sharp edges and other essential features captured within the data. The Precision Enhancement module can also be used to remove outliers from a point cloud. By filtering out the “noise,” or errors, in point cloud data, the most accurate deliverable possible can be created. In addition to being used to clean LiDAR data, the Precision Enhancement module can also be applied to photogrammetric point clouds.
UAV LiDAR data is inherently noisy, which brings about challenges of accurately recreating the features scanned by the LiDAR sensor.
There are two types of errors the precision enhancement module addresses:
- Random Error, which creates what is referred to as noise.
- Non-modeled Errors, which are the outliers. Outliers are values that are not statistically consistent with the other elements of the dataset.
Systematic errors should be previously addressed by utilizing correct boresight angles and possibly applying a strip adjustment routine before using precision enhancement.
Challenges of Precision Enhancement
The biggest challenge in precision enhancement is to find a trade-off between noise reduction and preserving any sharp edges and features collected in the data. Features such as buildings, powerlines, retaining walls, etc. all have edges that need to be preserved while reducing the thickness of the point cloud.
mdInfinity uses a combination of geometry and probability analysis in the precision enhancement denoising routine. By modeling the standard uncertainty of the GNSS, IMU, and LiDAR sensors a 3d error ellipse can be estimated for each point. This modeled error for each point is used to make a compromise between the local geometry of the point cloud and minimizing the point’s positional uncertainty. This approach is what allows the user to reduce the noise level of a UAV LIDAR point cloud while preserving sharp edges and features.
The Precision Enhancement module can also help users who require precise data but are not equipped with high-grade LiDAR systems. In this case, noise reduction and resulting thinning of the point cloud can help bridge the gap from the low precision sensors.
Higher Quality Deliverables
Reducing the noise in the point cloud can aid in making point cloud analysis tools more effective.
For example, classification tools will give better results due to the precision enhancement module improving the visibility of the features in the point cloud.
Ultimately, introducing the precision enhancement module to your point cloud processing workflow will improve the accuracy of the products extracted from the final point cloud and the quality of your deliverables.
To learn more about using the Precision Enhancement Data Module in mdInfinity, CLICK HERE to speak with a representative from Microdrones.