See how to extract rails in LP360 and view the 3D point cloud
With the merge of mdInfinity into LP360, users of Microdrones fully integrated systems can take advantage of the capabilities of LP360 Drone to transform raw flight data and generate colorized, georeferenced 3D LiDAR point clouds. In addition, the software allows you to geotag the imagery collected to create highly accurate orthomosaics.
In the workflow video below, Jaume Cazorla, the LP360 Customer Success Manager for Europe, will demonstrate the workflow to extract rail tracks in LP360 without the need to employ other software applications. Then, use our 3D point cloud viewer, for a closer inspection of the tracks and surrounding area that was scanned with the mdLiDAR3000DL.
Extracting Rail Tracks
Drone LiDAR is a very effective method for creating three-dimensional modeling of railway tracks for mapping, inspection, and vegetation analysis along rail corridors. Three-dimensional point clouds of railways can be used to examine potential hazards along the railway infrastructure, identify track distortions and areas in need of maintenance.
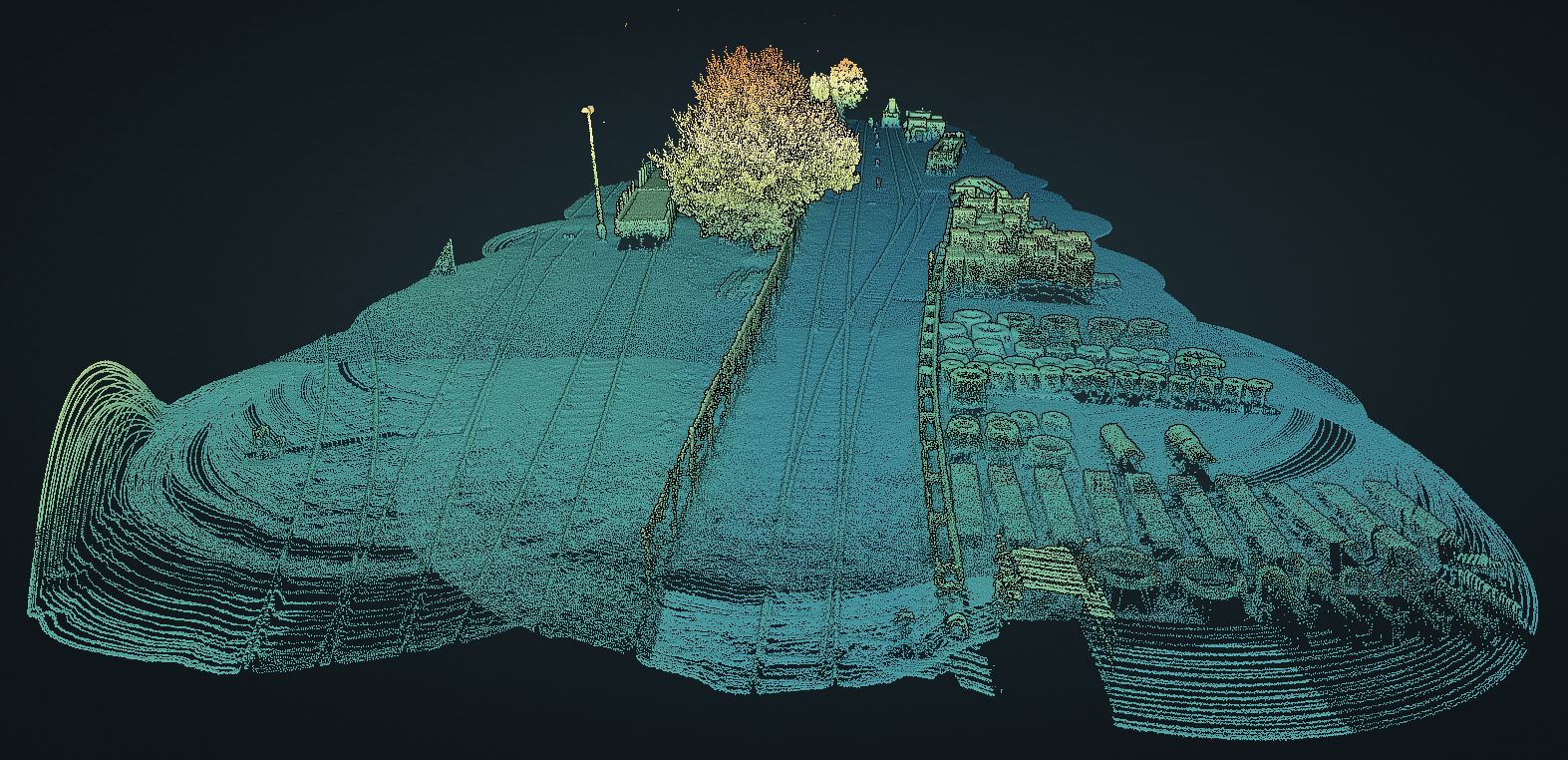
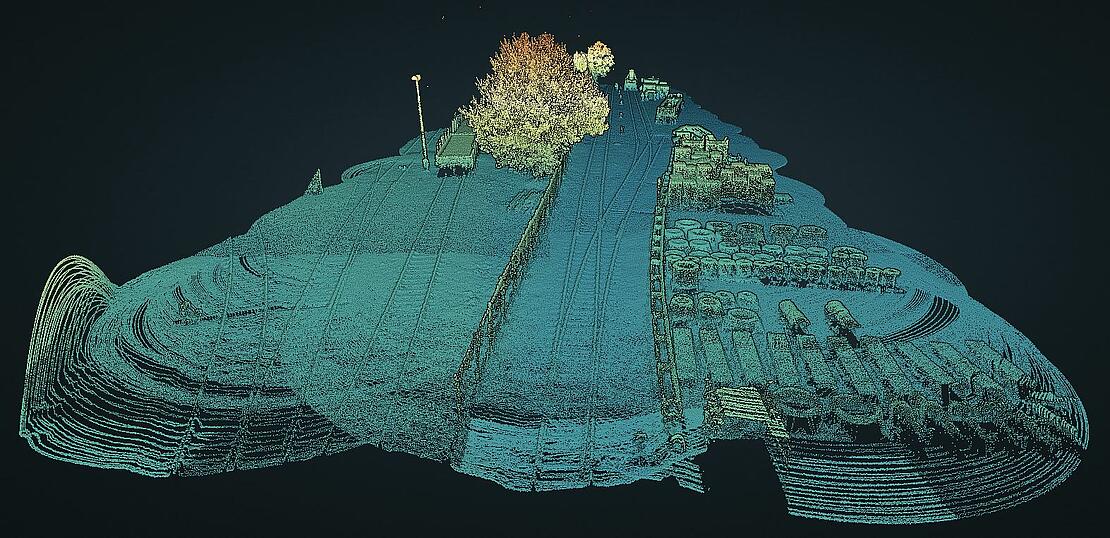
The data for this railway 3D point cloud was collected with an mdLiDAR3000DL, since the system has a specialized sensor for corridor mapping to collect data within a cone. The LiDAR sensor also has a small FOV but in contrast, is able to survey corridors (rail tracks or powerlines) with high definition. View the 3D point cloud by clicking on the image below.
Flight Plan
The flight plan was created using mdCockpit where the system flew a 130 meter railway corridor. The altitude was set at 50 meters with terrain following and flying at a constant flight altitude of 50 meters AGL at a speed of 3 meters per second. The terrain following functionality helps the user to safely plan a fixed elevation flight according to the data from a selected data source. The field of view was 46 degrees with 50% sidelap. The total flight duration was approximately 10 minutes.
Processing
The point cloud was processed and generated through the mdInfinity software suite using Geocoding, and the trajectory was created with POSPac. Then, the point cloud was generated in LP360 Drone to classify the tracks and extract the center line of the railway.
If you’re interested in using drone LiDAR and processing 3D point clouds in LP36, schedule a meeting to speak with one of our professional representatives.